

/image%2F1228896%2F20140911%2Fob_37989a_rubon68.jpg)
PROBLEMATIQUE RENCONTREE (CINEMATIQUE)
Contrairement aux années précédentes le robot devra cette année franchir une marche de 15 cm de hauteur.
Le contexte semble simple; en réalité ce nouveau défi complique considérablement la tâche!!
Il est désormais nécessaire que notre robot puisse réaliser une cinématique permettant le franchissement de la marche en bois pendant la course.
Aprés de nombreuses recherches de cinématiques, nous avons décidé de s'inspirer de la cinématique très connue; la cinématique Klann Linkage, qui semble adaptée au mouvement requis.
Suite à une étude papier (dessins) et à la concertation de l'ensemble du groupe nous avons réalisé un prototype sur le logiciel de conception CATIA.
Cette première version de notre Robot est un ensemble de bielles / manivelles. Des problèmes de collisions avec l'arbre moteur seront à éliminer grâce à des pièces de formes spéciales (en U)
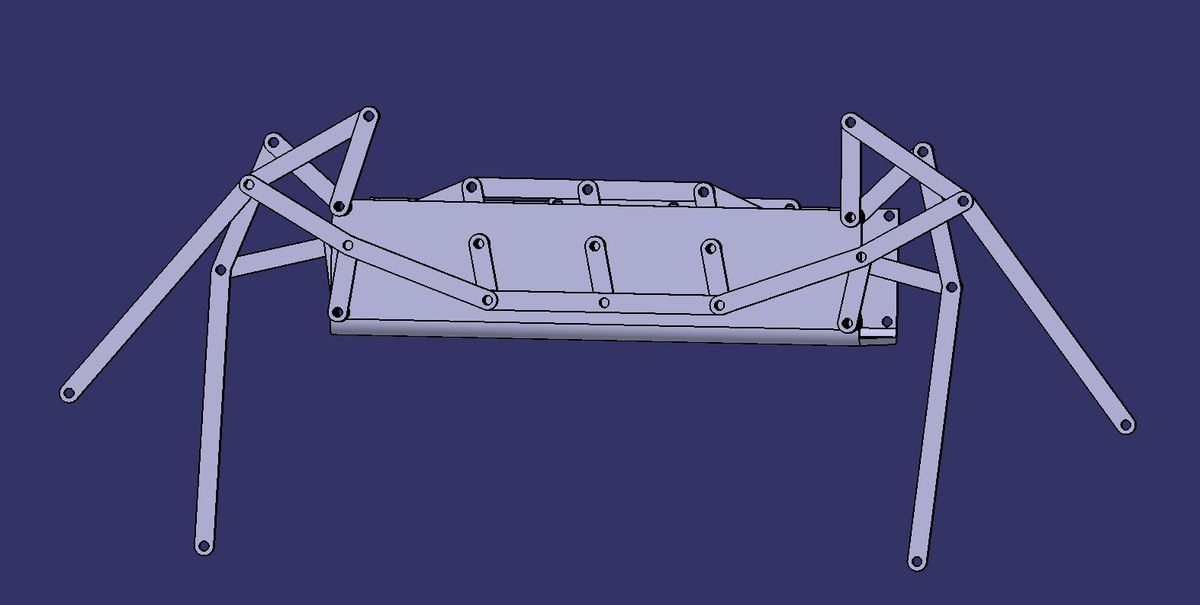
Prototype 1ère génération du robot marcheur IUT GMP Brest
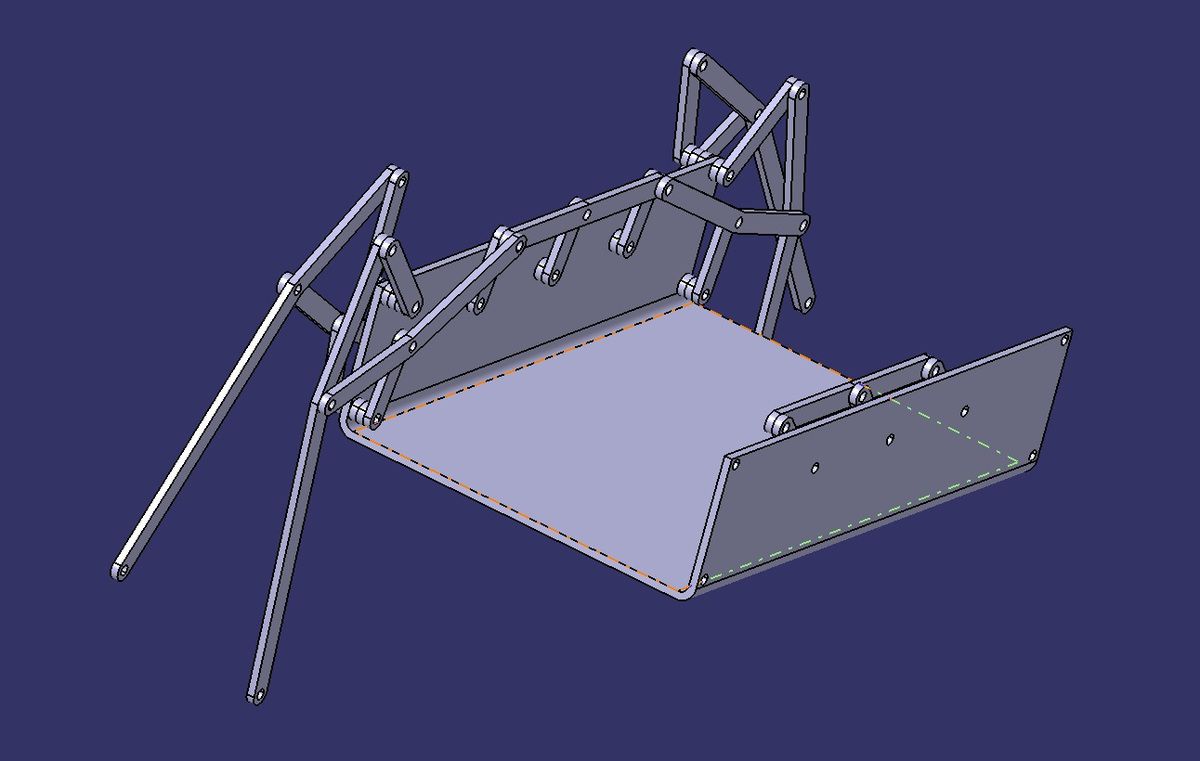
Prototype 1ère génération du robot marcheur IUT GMP Brest
Une alternative aux problèmes de collision avec l'arbre moteur serait d'installer des pignons pour le transfert du mouvement.
C'est là qu'intervient la conception de notre prototype 2ème génération incluant des engrenages



/image%2F1228896%2F20150322%2Fob_1dce91_telegramme.PNG)
/http%3A%2F%2Fi.ytimg.com%2Fvi%2FuXvrWlIwMEY%2Fhqdefault.jpg)
/http%3A%2F%2Fi.ytimg.com%2Fvi%2FocTSFZOrMLU%2Fhqdefault.jpg)
/image%2F1228896%2F20150322%2Fob_8507be_imag0566.jpg)